Shifan Zhu
I am a Ph.D. student in Dynamic and Autonomous Robotics Systems (DARoS) Lab at UMass Amherst, advised by Donghyun Kim. My research focuses on human-motion foundation models, event-camera–based state estimation, and robust perception in challenging conditions such as rapid motion, low light, and extreme brightness.

– Human Motion Foundation Models. Developing autonomous mobile data collection platform and develop metrically accurate, semantically meaningful understanding of human motion in real-world environments.
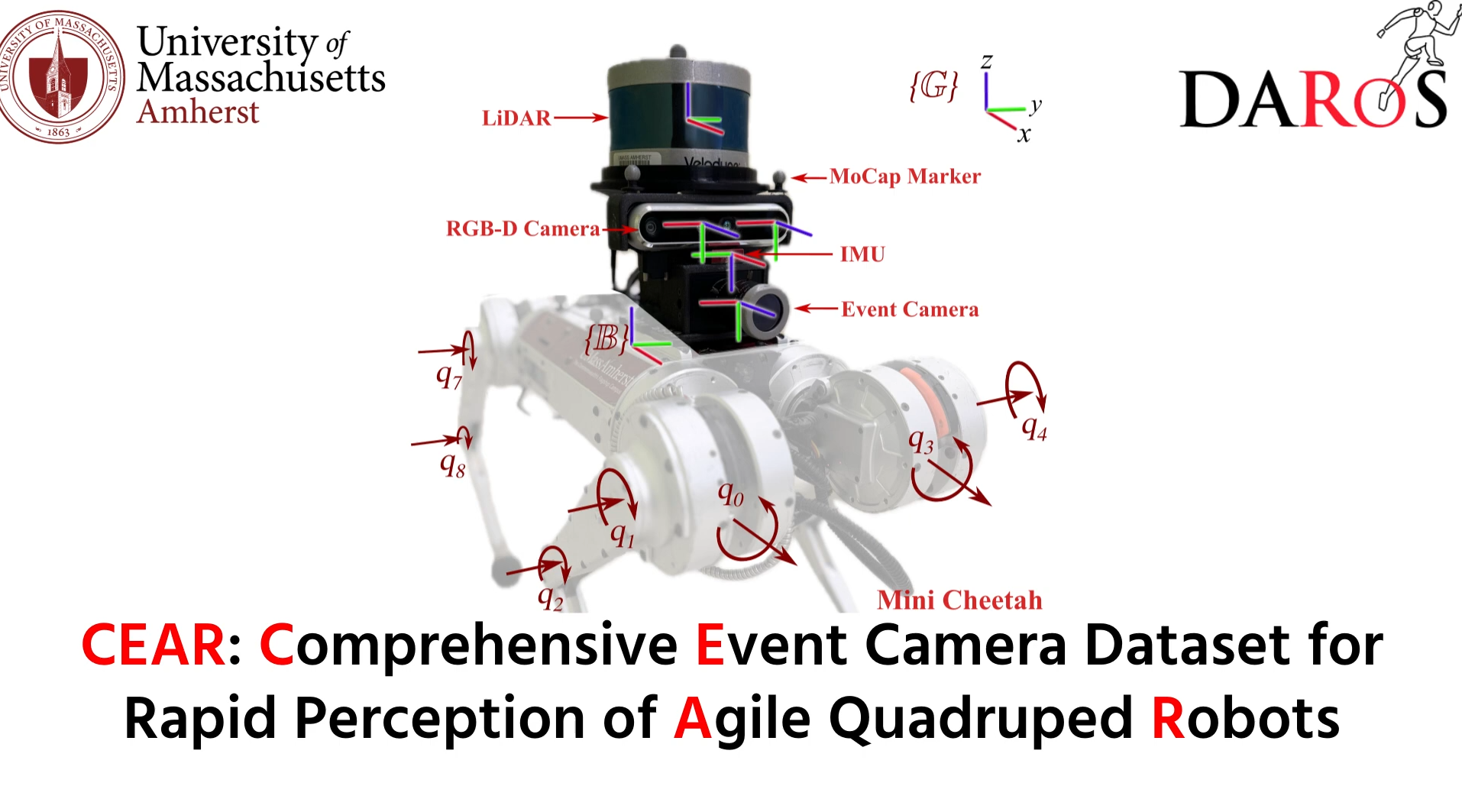
– Invariant State Estimation in Challenging Conditions. Developed a state-independent, time-invariant observation model that improves rapid, robust, and consistent multi-sensor state estimation using event cameras, IMUs, joint encoder and RGB-D data.
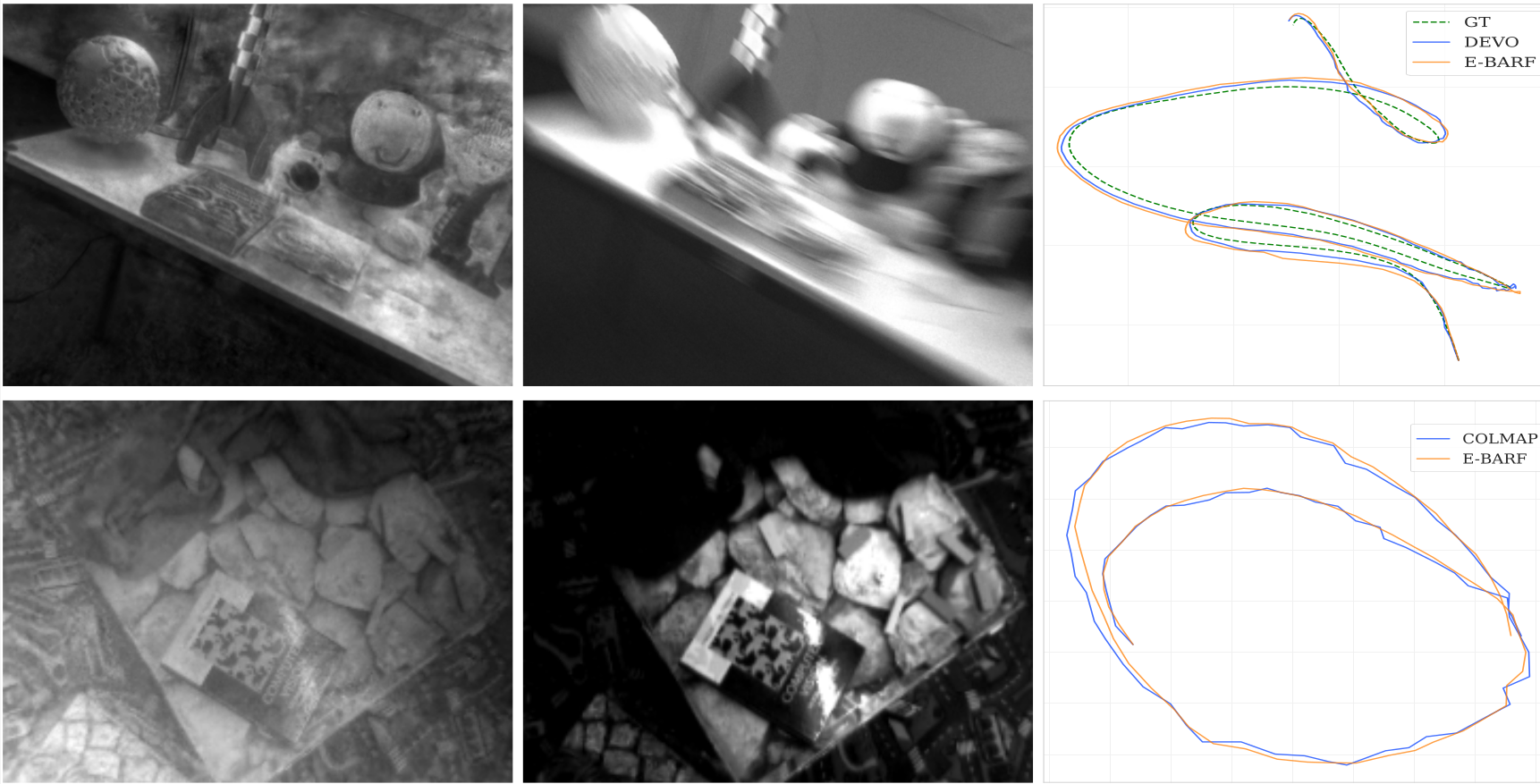
– Event NeRF & Pose Optimization. Developed E-BARF, the first method to jointly optimize NeRF and event-camera trajectories using only event data. Introduced a differentiable event-NeRF bundle adjustment that enables robust 3D reconstruction under extreme lighting and high-speed motion.